د HK330 کمپیوټر CNC پینل آری
د محصول ویډیو
د کمپیوټر CNC پینل HK330 ولیدل
۱. د داخل شوي پلیټ د عرض سره سم، اړین پلیټ پرې کړئ او په چټکۍ سره اصلي کاري حالت ته راستون شئ.
2. د پرې کولو سرعت د فریکونسي کنورټر لخوا کنټرول کیږي، کوم چې کولی شي د مختلف ضخامت او مختلف موادو پلیټونو باندې بریالي شي.
3. تغذیه د نیوماتیک تیرونکي مالګې میز غوره کوي، او د درنو پلیټ موادو بدلون اسانه دی. روبوټ په اتوماتيک ډول تغذیه کوي، د کار شدت ټیټ او د تولید لوړ موثریت لري.
۴. د مصنوعي تېروتنې له منځه وړلو او ابعادي دقت ښه کولو لپاره وارد شوي ډیلټا سرو موټور وکاروئ.
تخنیکي پیرامیټرې
| HK330 د امریکا متحده ایالاتو د سوداګرۍ خونه ده. | پیرامیټر |
| د پرې کولو اعظمي سرعت | ۰-۸۰ متره/ دقیقه |
| د بار وړونکي اعظمي سرعت | ۱۰۰ متره/ دقیقه |
| د اصلي ص موټرو ځواک | ۱۶.۵ کیلو واټ (اختیاري ۱۸.۵ کیلو واټ) |
| ټول ځواک | ۲۶.۵ کیلو واټه (اختیاري ۲۸.۵ کیلو واټه) |
| د کار کولو اعظمي اندازه | ۳۳۰۰ لیتره*۳۳۰۰ واټ*۱۰۰ ایچ (ملي متره) اختیاري ۱۲۰H(ملي متره) |
| د کار کولو لږترلږه اندازه | ۳۴ لیتره*۴۵ واټ(ملي متره) |
| ټولیز اندازه | ۵۳۰۰ لیتره*۵۹۵۰ واټه*۱۹۰۰ ایچ (ملي متره) |

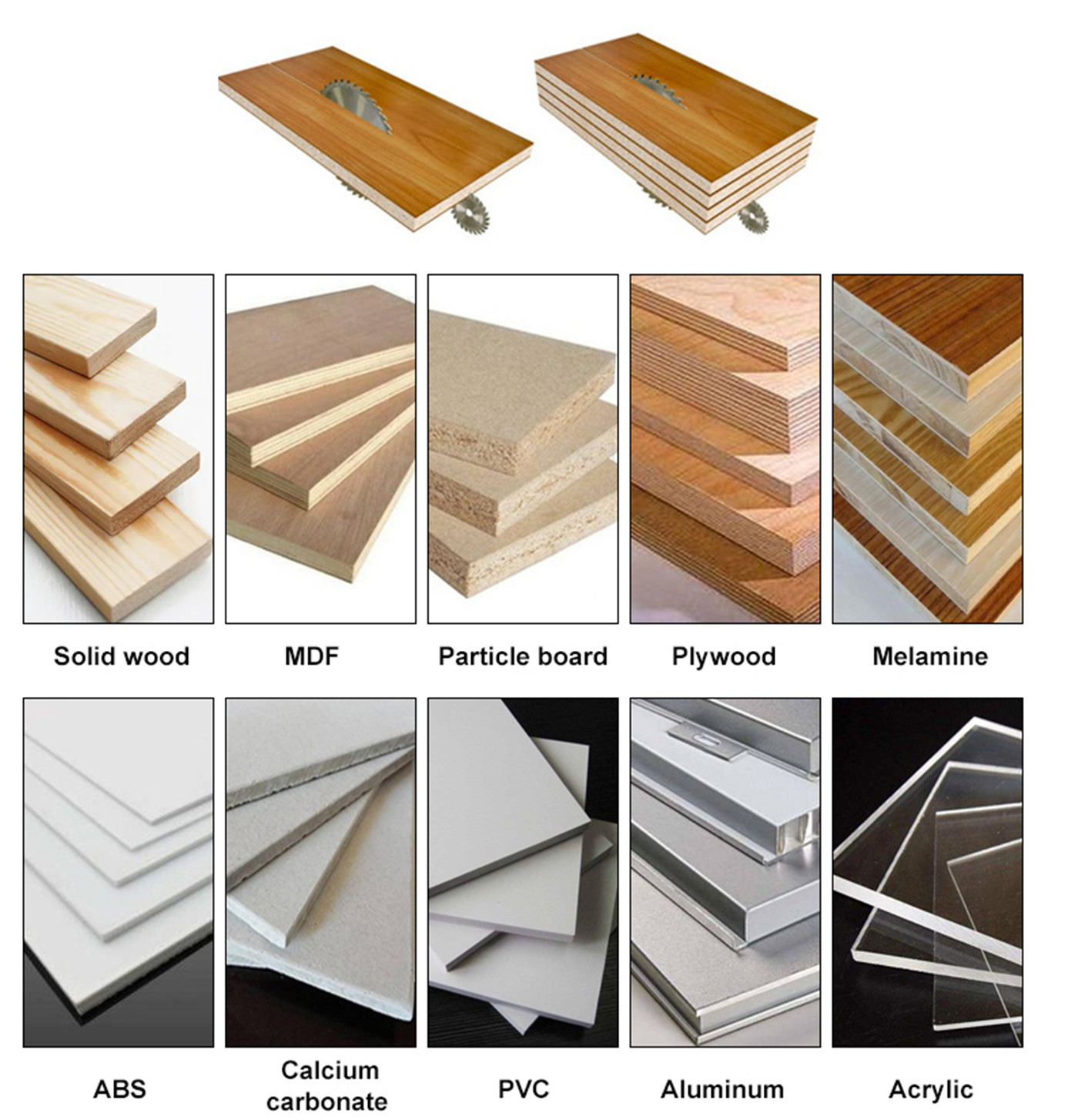
د لوی پلیټ پروسس کولو اړتیاوې پوره کړئ، د اره کولو اعظمي اندازه 2800 * 2800 ملي میتر او د اره کولو ضخامت 105 ملي میتر، او پراخه تطبیق سره

د سرو میخانیکي کلیمپ لاس ۱۱ واحد لوی ډیزاین میخانیکي کلپ

روبوټیک بازو د لوړ دقت لرونکي ورم ګیر ریډیوسر او د تغذیه کولو ګیر ریک غوره کوي، د ± 0.1 ملي میتر د پرې کولو دقت سره
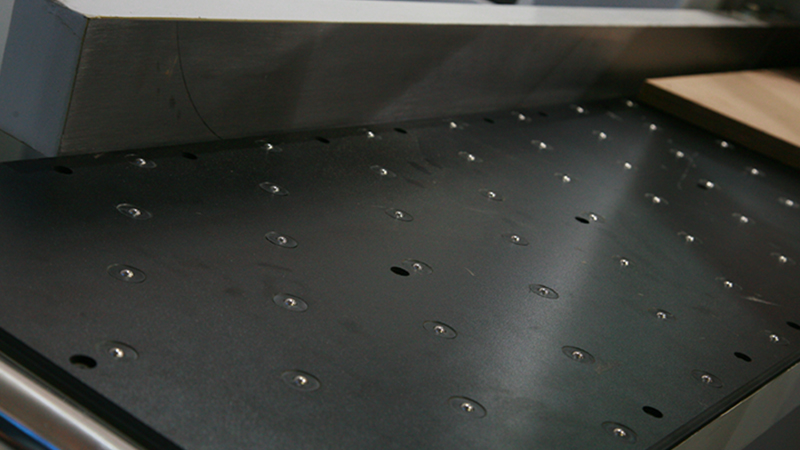
د کار میز د نیوماتیک لامبو وهونکي پلیټ فارم څخه جوړ شوی دی. د تختو حرکت کول خورا اسانه دي.
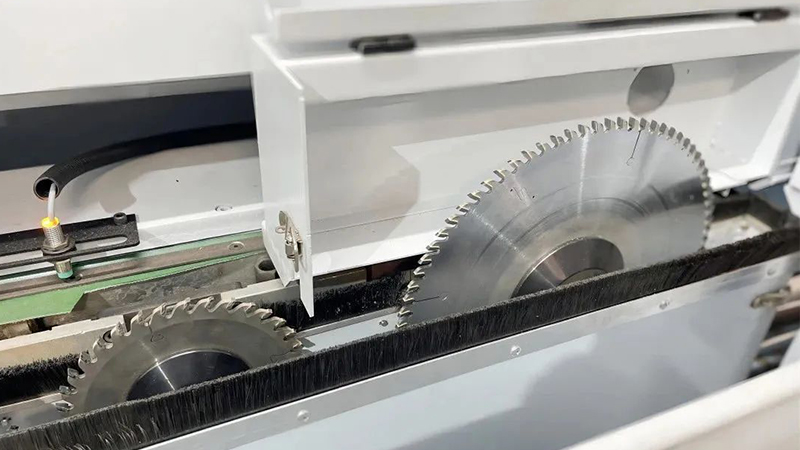
د سکور کولو آره د اره کولو اړتیاو سره سم په اتوماتيک ډول بدلیدلی شي. د لوړ کیفیت اره کولو لپاره د اصلي آرې سره همکاري وکړئ
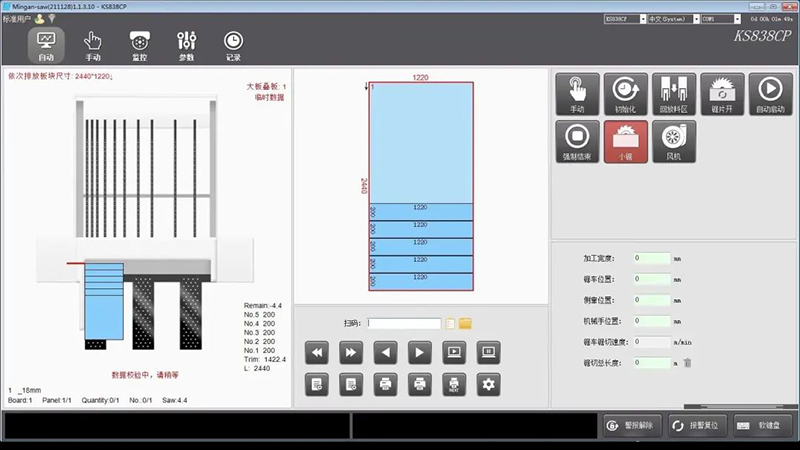
د موادو ترتیب د اتوماتیک اصلاح لپاره اختیاري اصلاح سافټویر او
د اره کولد کمپیوټر CNC پینل آری
نمونه